現在ページ作成中
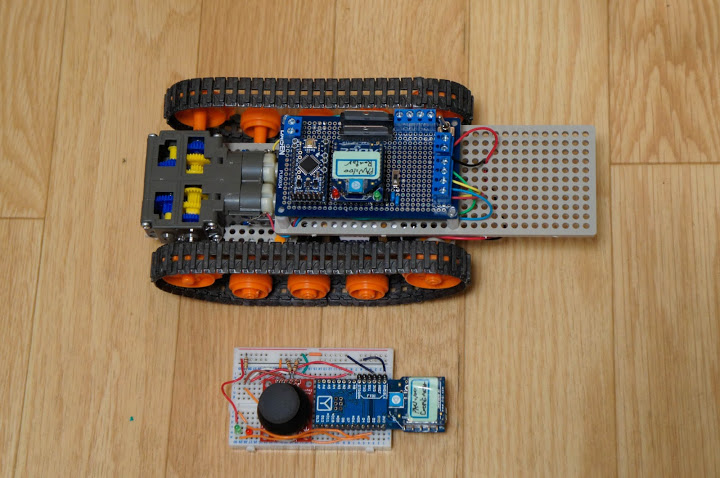
Arduino Tank1号機からの改良点
- eneloop4本で起動(1号機では6本必要であった)
- Arduino pro miniを使用することで基盤をコンパクト化(シールド3段重ねからの脱出)
- ギア比を114:7から38.2に変更(回転数が115rpm→345rpmにアップ
Arduino Tank1号機からの使い回し
- コントローラー
- コントローラーは全く同じものを用いており、XBeeを入れ替えるだけで利用可能
- Arduino Tank側のプログラム
今回わかったこと
- Arduino pro miniは5V供給をしなくても動作する(eneloop3本: 3.6Vでも動作した)
- ただし、クロックが変動しタイマー周期等が変わってしまっている可能性がある
- XBee(3.3V)→Arduino(5V)の接続は昇圧を行わなくても通信を行う事ができている
- ArduinoのHighの閾値の最低値は3Vであり、XBeeのHighの最低電圧は2.7Vであり本来は問題があるが、実際には特に問題なく動作している
- モータードライバーICや昇圧回路をハンダ付けする際には熱に弱いため、ソケットを噛ませてから固定するべきである
- キャタピラーは直進時に比べ旋回の際に非常にトルクが必要である
- 現在のギア比でも直進は全く問題なくできるが、旋回の際に非常に苦しそうな動作音がしている
- 次回はトルクチューンモーター等よりトルクのあるモーターを利用したい
- モータードライバーICの発熱が大きい, また接続法によって発熱が異なる
- モータードライバーICのVrefにPWMを入力し出力の制御をおこなうと、モーターに利用されなかった分の電流が熱に変換されてしまうらしい
- どのような回路になっているのか調査が必要
最終更新:2013年08月12日 16:39

